I’m passionate about electronics, modeling, 3D printing, CNC, DIY, and IoT. I also enjoy photography and sharing my projects as a YouTuber.
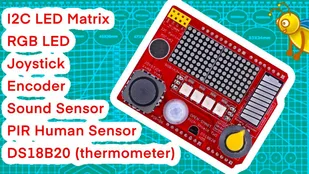
Another arduino shield: Rich Shield TWO
Milk v Duo 9$ computer
Embeetle IDE NOW supports Pico pi